
WatchBot
Descripción
A lo largo de los últimos años, la cantidad de dinero invertida en seguridad ha experimentado un importante incremento debido a diversos factores. Los sistemas de vigilancia de edificios se han convertido en un importante problema en la vidad cotidiana. La finalidad de este proyecto es el desarrollo de un sistema Multirobot que permita crear aplicaciones de vigilancia con monitorización a través de Internet. Cada robot del sistema podrá atender diferentes tareas de vigilancia diarias. La información de los sensores como imágenes en tiempo real capturadas por una cámara robotizada instalada en el robot, puede ser transmitida a la estación central de control mediante una red local. También es posible la teleoperación de los robots via Internet o intranet. La instalación del sistema se puede llevar a cabo en un breve espacio de tiempo gracias al entorno de programación de tareas de alto nivel RoboGraph. Utilizando esta herramienta, la aplicación puede ser programada utilizando redes de Petri con comandos y eventos definidos con anterioridad.
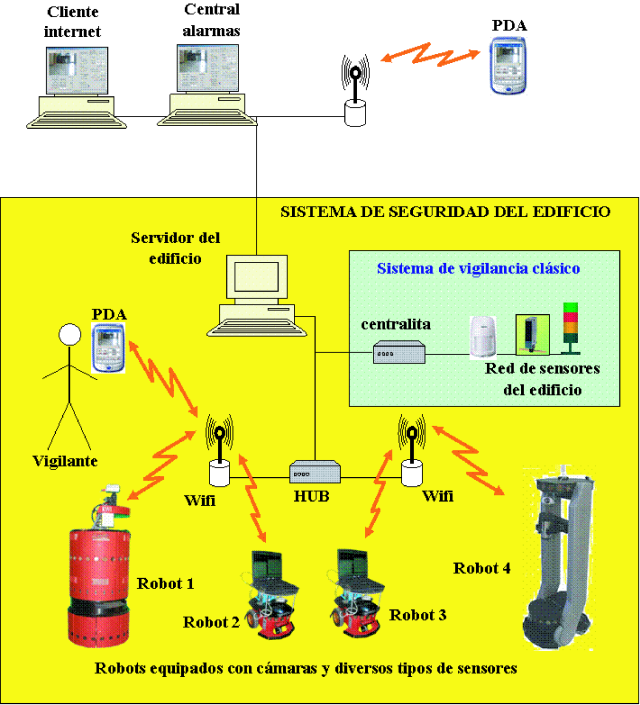
La primera figura muestra la arquitectura del sistema de vigilancia. Un conjunto de robots se integra con el sistema de vigilancia clásico del edificio con la finalidad de mejorar el rendimiento y proporcionar mayor flexibilidad.
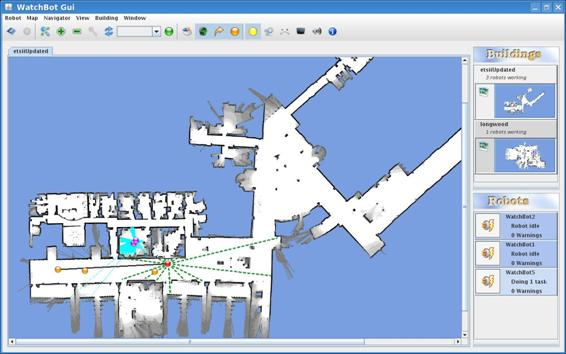
Los usuarios autorizados se pueden conectar al servidor central desde cualquier punto con acceso a Internet utilizando un interfaz de usuario GUI para monitorizar el sistema de vigilancia (robots, alarmas, etc). La segunda imagen muestra el GUI (Intefaz Gráfico de Usuario) de una aplicación de vigilancia con dos mapas: el primero de ellos (etsiiUpdated) con dos robots reales y dos simulados, y la segundo (longwood) con un robot simulado. Tareas como patrullar a lo largo de una ruta de puntos definida también pueden ser comandadas por los usuarios registrados.
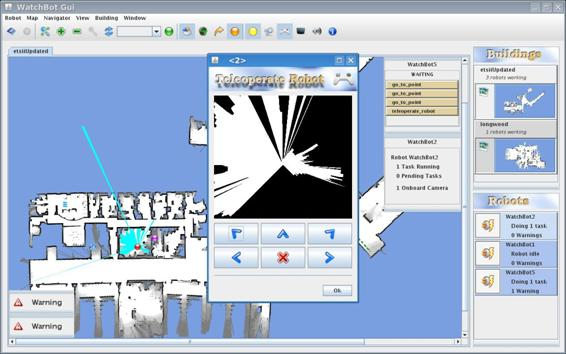
Utilizando el GUI, los usuarios también pueden teleoperar diferentes componentes del sistema, como pueden ser los robots, cámaras, etc. La tercera imagen muestra un interfaz gráfico para teleoperar el robot cuando el usuario no dispone de un joystick conectado al ordenador. Se observan también algunos avisos y notificaciones en la ventana principal. La información detallada de cada uno de esos avisos se puede obtener haciendo clic sobre ellos.
Los usuarios también puden ver información de los distintos sensores, como pueden ser los vídeos obtenidos por las cámaras. En la cuarta figura se pueden ver los vídeos de dos cámaras de diferentes robots.
El vídeo muestra las imágenes de dos cámaras instaladas en dos robots distintos navegando por nuestro departamento.
Este trabajo ha sido parcialmente subvencionado por el Ministerio Español de Ciencia e Innovación, (Proyecto DPI 2005-06210).
Publicaciones
Título: Enhancing Building Security Systems with Autonomous Robots
Autores: Joaquín L. Fernández, Diego P. Losada, Rafael Sanz.
Congreso: 2008 IEEE International Conference on Technologies for Practical Robot Applications.
Publicación: Proceedings of The 2008 IEEE International Conference on Technologies for Practical Robot Applications. pp:19-25
Lugar: Woburn, MA, USA
Año: 2008
ISBN: 978-1-4244-2792-5
Título: Incrementando la autonomía de robots móviles: Desarrollo de un sistema de recarga automática.
Autores: Diego Pérez Losada Enrique Paz Domonte Joaquín López Fernández
Congreso: Workshop de Agentes Físicos 2007
Publicaciones: Actas del VIII workshop en Agentes Físicos pp145-152
Lugar: Zaragoza, España, del 11 al 14 de septiembre 2007
Año: 2007
ISBN: 978-84-9732-597-4
Título: Creating wireless coverage maps for mobile robot applications
Autores: Joaquín López, Manuel Álvarez, Miguel Cacho, Enrique Paz and Diego Pérez
Congreso: WAF 2009 Workshop en Agentes Físicos
Publicación: Actas del X Workshop en Agentes Físicos. pp17-25
Lugar: Cáceres, España
Año: 2009
ISBN: 978-84-692-3220-0
Título: Sistema de vigilancia de edificios basado en robots móviles
Autores: Joaquín L. Fernández, Diego P. Losada, Rafael Sanz y Enrique P. Domonte
Congreso: Workshop Robot'2009
Publicación: Actas del Workshop
Lugar: Barcelona, España
Año: 2009
Galería
El sistema ha sido mostrado en el evento Xuventude Galiza Net 2009. Se puede ver el interfaz de usuario mientras los robots navegan por el evento: Aplicación WatchBot
Para conseguir autonomía durante largos periodos de tiempo, hemos desarrollado un mecanismo de recarga que permite a los robots detener sus tareas habituales, ir a un punto de carga y pasar a ejecutar una secuencia de recarga. En el vídeo se puede ver a uno de nuestros robots cargando las baterías: Robot Charging.
El interfaz gráfico incluye muchas funciones. El siguiente vídeo muestra las imágenes de las cámaras de dos robots diferentes: WatchBot Cameras.