RoboCAN
Descripción
RoboCAN es un sistema de comunicaciones basado en CAN que permite conectar sensores y actuadores de una base móvil e integrarlos en la arquitectura de navegación específica. La finalidad de este proyecto es proporcionar un sistema simple, flexible y abierto que permita conectar diferentes componentes hardware en un robot móvil. Módulos con sensores y actuadores pueden conectarse y desconectarse del bus con el sistema en funcionamiento, de un modo similar a como funcionan los dispositivos USB en un PC. El sistema ya ha sido testeado en nuestro robot RATO para reemplazar el hardware que controlaba los sensores sónar y táctiles, integrándolos en nuestra arquitectura de navegación. El sistema de control de motores también ha sido reemplazado por un par de tarjetas conectadas a RoboCAN.
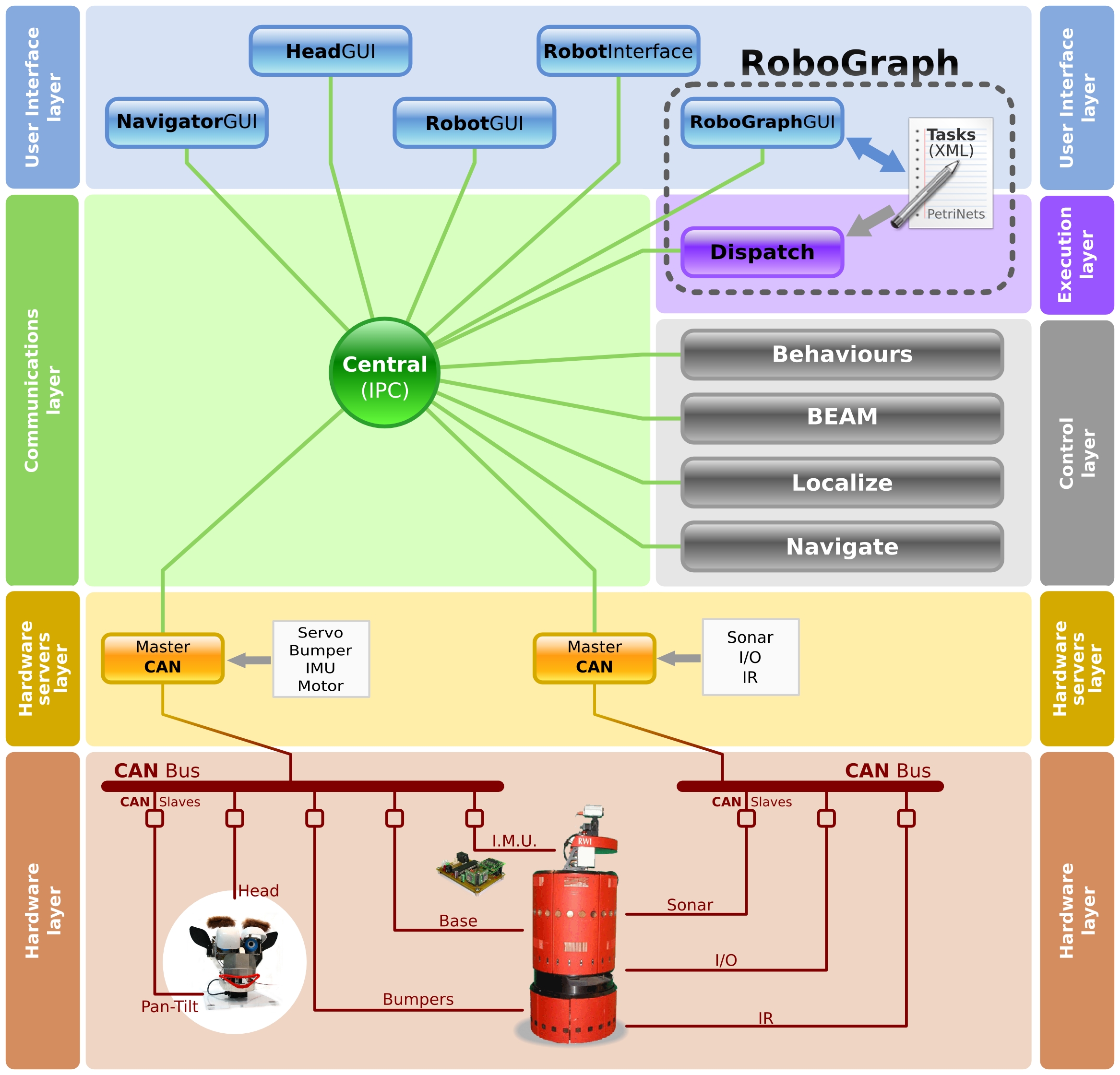
La siguiente figura muestra como RoboCAN es la herramienta utilizada en RIDE para conectar los distintos dispositivos hardware (sensores y actuadores) con el PC de abordo.

El protocolo RoboCAN es un sistema maestro-esclavo como el mostrado en la siguiente figura, donde un conjunto de esclavos (dispositivos) están conectados a un maestro (pc de abordo). Un simple servidor CAN controla la conexión y desconexión de los diferentes módulos esclavos, cargando el correspondiente driver para cada uno de ellos. Esto se realiza de un modo similar a como funcionan los dispositivos USB, que pueden ser conectados y desconectados de un PC, siendo cargado el driver necesario para utilizarlo. Por ejemplo, si un módulo de sensores sónar se conecta, el servidor CAN, en primer lugar, registrará el dispositivo e iniciará la conexión con el nuevo módulo y una vez identificado el tipo de dispositivo cargará el driver correspondiente para manejar el sónar.
Los módulos pueden conectarse en cualquier momento y en cualquier orden. La conexión y desconexión se detecta mediante tramas de watchdog (cualquier trama o una trama especial de watchdog en caso de no transmitirse información durante el periodo de watchdog).
Publicaciones
Título: Communication framework for sensor-actuator data in mobile robots.
Autores: J. L. Fernández, Maria J. Souto, Diego P. Losada, R. Sanz, E. Paz
Congreso: ISIE-2007 IEEE International Symposium on Industrial Electronics
Publicaciones: Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, pp:1502-150.
Lugar: Vigo, España, del 4 al 7 de julio de 2007
Año: 2007
ISBN: 1-4244-0755-9