RoboCAN
Overview
RoboCAN is a CAN based communication system to connect sensors and actuators in a mobile robot platform and integrate them in specific navigation architecture. The goal of this work is to provide a simple, flexible and open system that allows connecting different hardware components in a mobile robot. Sensor and actuator modules can be connected or disconnected to a computer while the system is working in a similar way that USB devices work. The system has been tested in our mobile robot Rato to replace the old sensor system and has proven to integrate a ring of sonar sensors and a set of tactile sensors in our navigation architecture. The motion system has also been replaced by a couple of control cards connected to RoboCAN.
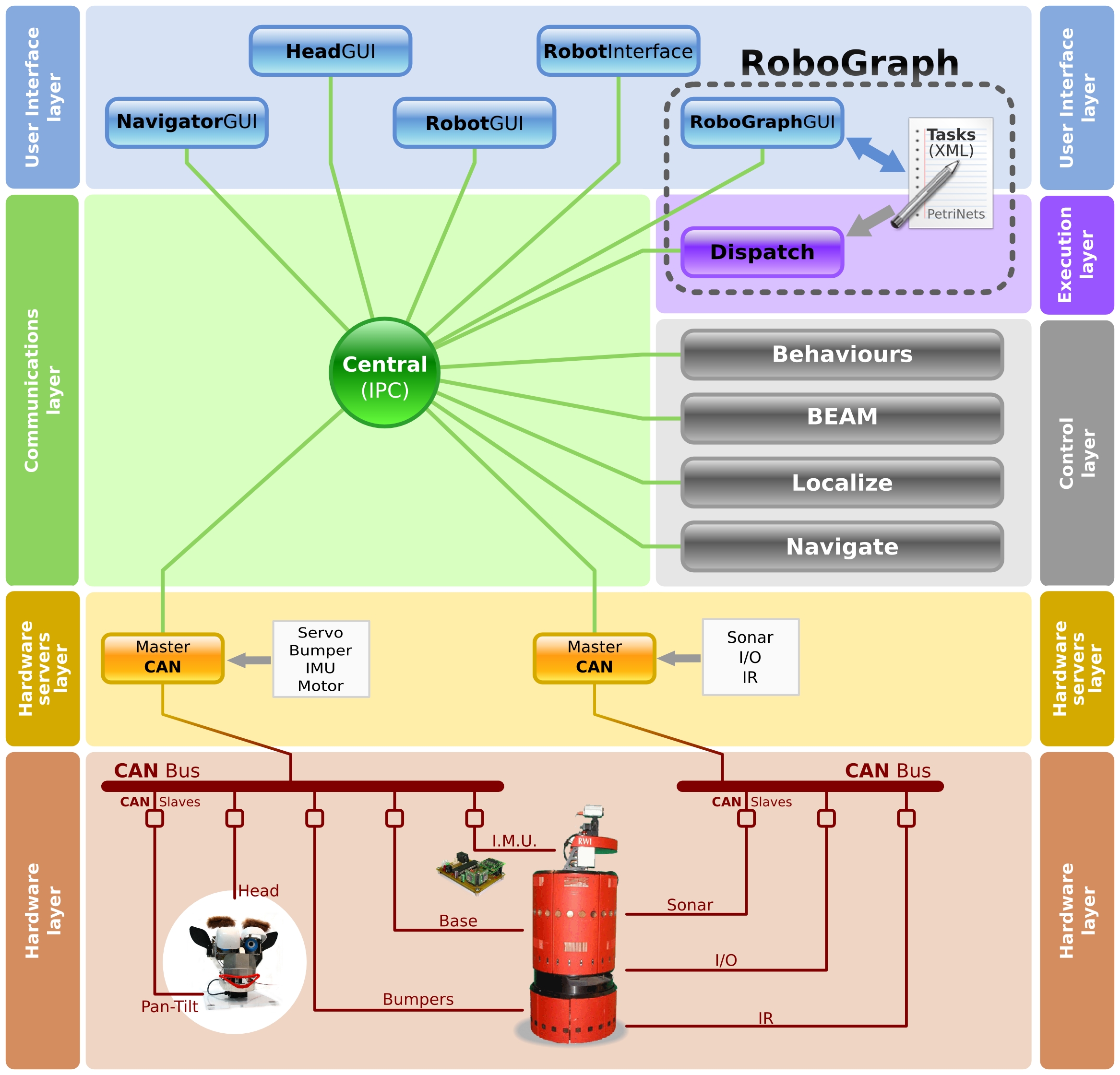
Next figure represents that RoboCAN is the connection system used in RIDE to connect all the onboard devices (sensors and actuators) to the onboard computer.

RoboCAN protocol is a master-slave system as shown in next figure where a set of slaves (devices) connect to the master (onboard computer).A simple CAN server handles the connection and disconnection of the different slaves loading the corresponding driver. This is done in a similar way that USB devices can be plugged and unplugged to a computer and the driver will be loaded accordingly. For example, if a module with sonar sensors is connected, the CAN server will first register and initialize the new module connection and then it will identify the module to hand over the messages to the sonar-driver.
Modules can be connected at any time and in any order. Connection and disconnection is detected using a watchdog message (any frame or a special watchdog frame if no other frame is issued for the watchdog period).
Publications
Title: Communication framework for sensor-actuator data in mobile robots.
Authors: J. L. Fernández, Maria J. Souto, Diego P. Losada, R. Sanz, E. Paz
Congress: ISIE-2007 IEEE International Symposium on Industrial Electronics
Publication: Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, pp:1502-150.
Place: Vigo, Spain, from 4 to 7 July 2007
Year: 2007
ISBN: 1-4244-0755-9