
WatchBot
Overview
In the last few years, the amount of money spent on security has grown due to a number of factors. The surveillance system of buildings has particularly become an important issue to human daily life. The goal of this project is to develop a Multirobot system for building surveillance applications monitored through Internet. Each robot can handle some daily surveillance routine tasks. Sensor information such as real-time images captured by a camera on the robot with pan/tilt/zoom functions can be transmitted back to the central management office via a local area network. Teleoperation of the robots via the Internet or intranet is also possible. The complete system can be installed and reprogrammed in a very short time thanks to a high level task application programming environment named RoboGraph. Using this tool the application can be programmed using Petri nets with commands and events previously defined.
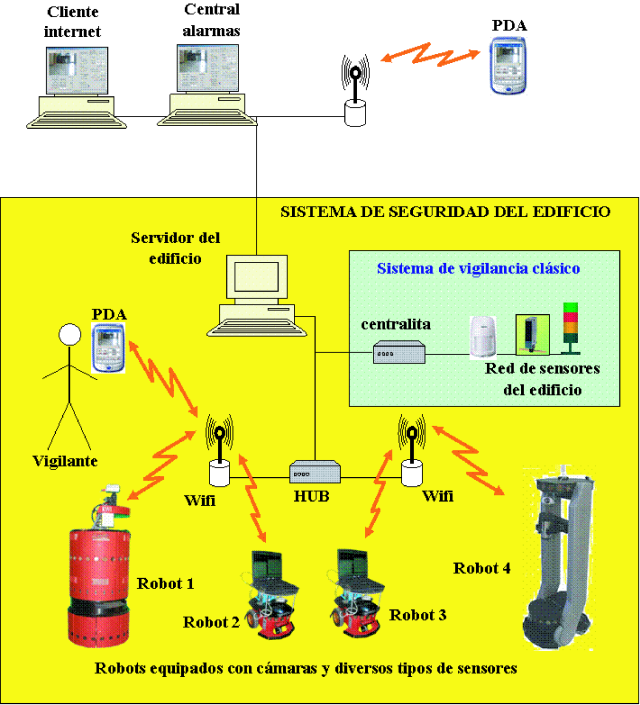
Next figure shows the surveillance system architecture. A set of robots is integrated with the classic building surveillance system in order to enhance the performance and provide more flexibility
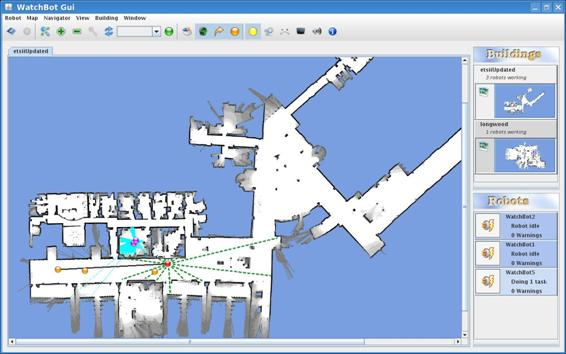
Authorized users can connect to the central home server from anywhere on the web using a GUI and monitor the surveillance system (robots, alarms, etc). Next image shows the GUI of a surveillance application with two maps: the first one (etsiiUpdated) with two real robots and two simulated and the second one (longwood) with one simulated robot. New tasks such as patrol a route defined as a sequence of points to visit can also be commanded by registered users.
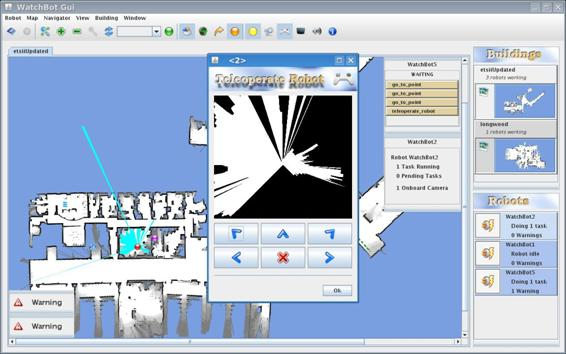
Using the GUI, users can also teleoperate different elements such as robots movements, cameras, etc. Next image shows a simple GUI to teleoperate the robot when the user has not a joystick connected on its computer. Notice also that a couple of warnings have appeared in the main window. Information about the warnings can be obtained by clicking on them.
Users can also see information from different sensors such as videos from the cameras.
The movie shows the video from two cameras on two different robots running in our office narrow environment.
This work has been partially supported by the Spanish Ministry of Science and Innovation, (Project DPI 2005-06210).
Publications
Title: Enhancing Building Security Systems with Autonomous Robots
Authors: Joaquín L. Fernández, Diego P. Losada, Rafael Sanz.
Congress: 2008 IEEE International Conference on Technologies for Practical Robot Applications.
Publication: Proceedings of The 2008 IEEE International Conference on Technologies for Practical Robot Applications. pp:19-25
Place: Woburn, MA, USA
Year: 2008
ISBN: 978-1-4244-2792-5
Title: Incrementando la autonomía de robots móviles: Desarrollo de un sistema de recarga automática.
Authors: Diego Pérez Losada Enrique Paz Domonte Joaquín López Fernández
Congress: Workshop de Agentes Físicos 2007
Publication: Actas del VIII workshop en Agentes Físicos pp145-152
Place: Zaragoza, Spain, from 11 to 14 September 2007
Year: 2007
ISBN: 978-84-9732-597-4
Title: Creating wireless coverage maps for mobile robot applications
Authors: Joaquín López, Manuel Álvarez, Miguel Cacho, Enrique Paz and Diego Pérez
Congress: WAF 2009 Workshop en Agentes Físicos
Publication: Actas del X Workshop en Agentes Físicos. pp17-25
Place: Cáceres, Spain
Year: 2009
ISBN: 978-84-692-3220-0
Title: Sistema de vigilancia de edificios basado en robots móviles
Authors: Joaquín L. Fernández, Diego P. Losada, Rafael Sanz y Enrique P. Domonte
Congress: Workshop Robot'2009
Publication: Actas del Workshop
Place: Barcelona, Spain
Year: 2009
Gallery
The system has been shown in the Xuventude Galiza Net 2009 event. See the GUI main window while the robots navigate the event: WatchBot Application.
To achieve true long-term autonomy, we have developed a recharging mechanism which allows a robot to stop its regular operation, go to near the charging station and switch to a docking sequence. See one of the robots docking to charge the batteries: Robot Charging.
The main GUI window includes several functions. Next video shows the videos of the cameras on two different robots: WatchBot Cameras.