Other Tools
Overview
Developing and running a mobile robot application includes several tasks that are common to different projects. We have identified some of these tasks and added some tools to carry them out. The final goal is to integrate them all in the Robotics Integrated Development Environment.
Module Manager
The module manager is a system monitor/management named user_interface. This system monitor displays the status of multiple application components in graphical form, allow for the management of the components operation, ranging from starting and stopping to adjustment of parameters.
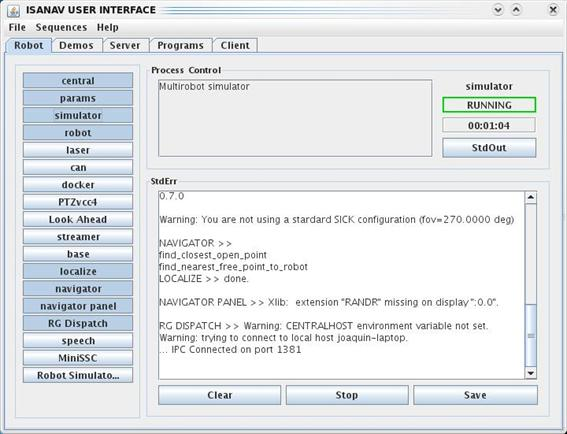
The number of modules that must be included in a project can be considerable. In order to start, stop and monitor them, while running the different tests and demos, a graphical tool that allows to run and monitor a sequence of modules has been created. This tool named user_interface allows to define the parameters to start each module and also to define sequences of modules that need to be started for one execution. Once define, the whole sequence can be started with one click of the mouse. Besides, this tool provides an interface that gives access to all components in the system architecture and provides mechanisms to manage them.
Robot Web Interface Configuration
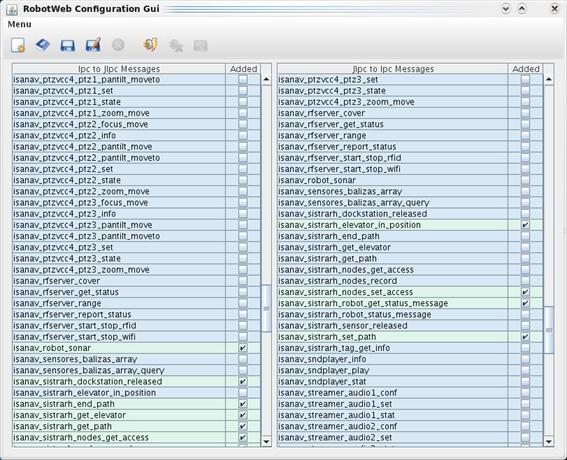
The coupling between both real-time and soft-time communication systems has been implemented using an interface service (Robot_Web Interface) as shown in fig. 1 and fig. 2. This interface service is a module connected to both, IPC and JIPC systems, acting as a bi-directional mirror between IPC and JIPC messages. Even though the running module is application independent, a list of messages that must be exchanged between both communication systems (IPC and JIPC) is stored in a xml file. This file is created using a graphical tool where users select the messages that must be exchanged in both directions and other parameters. Next figure shows the GUI with the two list of messages one for the messages from IPC to JIPC and the other from JIPC to IPC.